Miller Indices Transformation in HCP
I used to find it difficult to transform the Miller index in close-packed hexagonal (HCP). I mean, it should not be difficult theoretically, but it seems to be hard to understand. Thus, I spend some time to describe it in Matrix Form, in order to make it easy to grasp, and easy to calculate by programming.
I have to confess that, this article is just a PRACTICE.
Perhaps it can be the very first step for me to dig into more challenging problems (I feel sorry to say that I’m not a good English user, but I am trying to make it better).
OK, now let’s start.
Inference
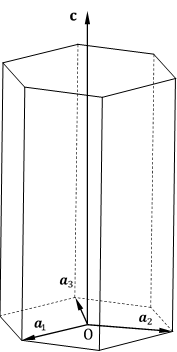
The 3-axis coordination $[UVW]$ represents the same direction as the 4-axis coordination $[uvtw]$. And, as we know, $[UVW]$ and $[uvtw]$ are both vectors, which can be described with their own primitive vectors. So we have:
In geometry, we have a relationship between vectors, this is:
\[a_{1}+a_{2} = -a_{3}\]Also, since it is satiated to describe a vector in a plane with two primitive vectors rather than three, we have relationship between indexes as below:
\[-t=u+v\]Having solved all the equations above, we get:
\[U=2u+v, V=2v+u, W=w\]An easier description with matrix is:
\[\left[\begin{matrix} U \\ V \\ W \end{matrix}\right] =\left[\begin{matrix} 2 & 1 & 0 \\ 1 & 2 & 0 \\ 0 & 0 & 1 \end{matrix}\right] \left[\begin{matrix} u \\ v \\ w \end{matrix}\right]\]In linear algebra, theoretically we can solve vector equation $Ab=x$ by method like $A^{−1}b$, namely, the inversed $A$ times the vector $b$. Therefore, the inversed description of the matrix formula is:
\[\left[\begin{matrix} u \\ v \\ w \end{matrix}\right] =\left[\begin{matrix} \dfrac{2}{3} & -\dfrac{1}{3} & 0 \\ -\dfrac{1}{3} & \dfrac{2}{3} & 0 \\ 0 & 0 & 1 \end{matrix}\right] \left[\begin{matrix} U \\ V \\ W \end{matrix}\right]\]